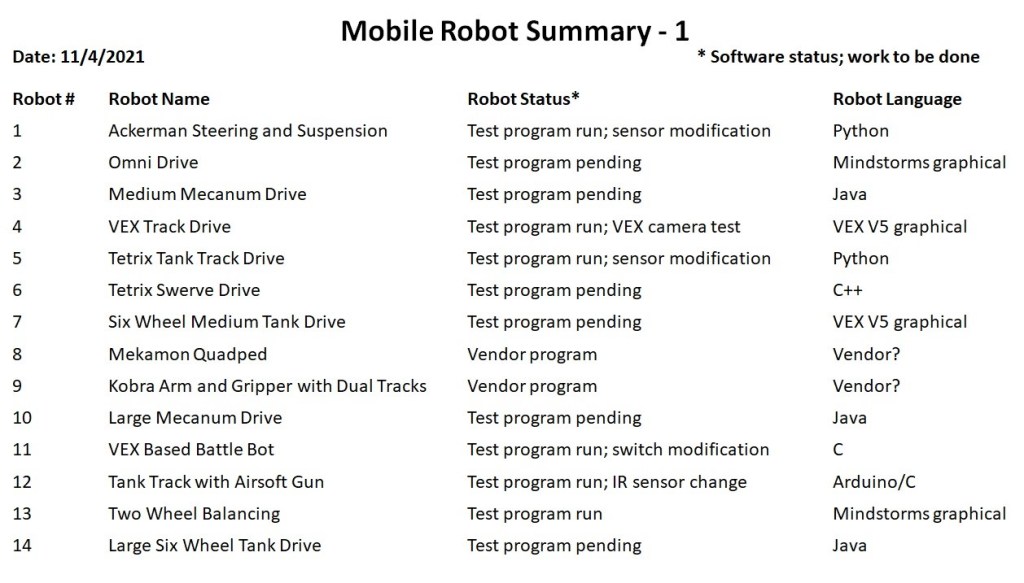
This is the third set of descriptions of the mobile robots either built or purchased … or a bit of both. At the end of this set are summary pages of with some status and software information. The total I have listed is 30 robots of various varieties. A legitimate question is whether I will ever complete and program the constructed one or investigate the purchased ones. I’ll accept that the numbers are not too favorable since there are lot on my list and new materials, computers, sensors and complete robots become available all the time and some are worth looking at. My intent is not to go down the list but to work on and add comment to those that are of greatest interest or in the case of purchased / vendor machines are more investigation and observation. Also in some cases I will consolidate information on sensors, computers, batteries and other topics.
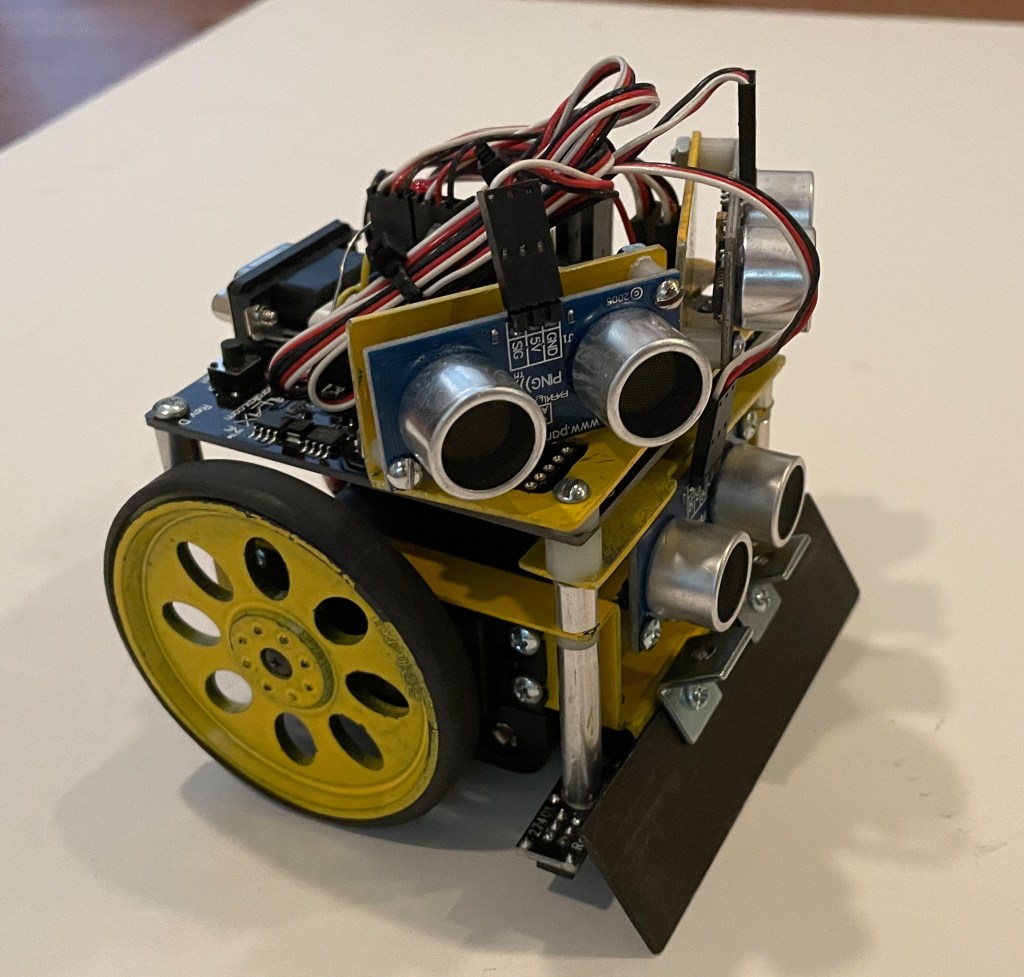
Robot 21 – Parallax Boe-Bot: The Parallax Boe-Bot is a small two wheel with an idler wheel, tank drive robot built on an aluminum pad. The computer is a Basic Stamp and Parallax sensors are used. Simple as it is, this robot has served for numbers of years as a starting robot. The primary interest at this point is its application for autonomous sumo bot competition (I have 2) and for autonomous line following.
Robot 22 – Nerf Gun Mechanism: The Nerf Gun Mechanism is not a mobile robot but is a computer driven target acquisition, target tracking and pneumatic firing of nerf projectiles. The Nerf gun part is the gun assemble of a Air Hogs Battle Tracker. The firing control is with a VEX V5 computer, sensor and communication / controller system. The nerf gun mechanism will be mounted on a mobile base. The functions of interest are the use of the V5 camera for target tracking and the overall system for fire control.

Robot 23 – Hexpod Robot: The Hexpod robot started as a structural kit with a PIC controller. The 18 servos have been upgraded and a Modern Robotics Fusion computer is used to control two servo control modules. Communication is via Bluetooth using a Logitech controller. A lithium ion battery is used. IR motion sensors and distance sensors are used. As apparent this hexpod is circular. A linear hexpod has also been constructed. The primary function of interest is leg control of a hexpod.

Robot 24: High Clearance Wheel Tank Drive: This robot is planned but has not yet been constructed. The objective is to use Intel Realsense devices (i.e. LIDAR L515) for navigation and object detection. Computer requirements remain to be determined as well as additional sensors and communication implementation. The robot is planned to have 8 inch pneumatic wheels. The functional objectives include high clearance drive system and Realsense device navigation and objective analysis. There is not yet a picture.
Robot 25: Yahboom Nvidia Jetson Nano Robot: This robot is purchased as a kit. It is tracked tank drive and is a multi-function tank AI education robot based on NVIDIA Jetson Nano A02 or B01 computer. Communication is via Wi-Fi to smart devices. The provided Python based software supports face recognition, object tracking, obstacle avoidance and other functions. The objective of investigating this robot is to learn about NVIDIA GPU based processor application.

Robot 26 – DJI EP Core: The DJI EP Core is a mecanum drive robot with a gripper and arm. Through the SDK it can be programmed for object and text recognition with machine learning applications. Sensors ports allow third party sensors to be used. This robot is of interest as it provides the potential to investigate AI based object recognition functions combined first person viewing, integrated arm/gripper coordination and inter robot communication with other DJI products.

Robot 27 – Robotis Swerve Drive Robot: The combination of Robotis servos and software provide a unique approach to motion control. The digital servos include internal sensing including position and current. The software provides the capability to set positions and then use these in the operational program for the robot. The swerve drive versatility is an effective implementation to investigate this mechanical and software coordination of control. This robot is yet to be constructed.
Robot 28 – Spygear Track Tank Drive: The Spygear robot was released as a product in 2010. It was and still is significant for the range of functions as well as the open source programming possible. The robot provided audio in and out, video in for both visible and infrared for first person viewing and programmability for autonomous operation. While used in numbers of classes, this robot still has functional capability to investigate.

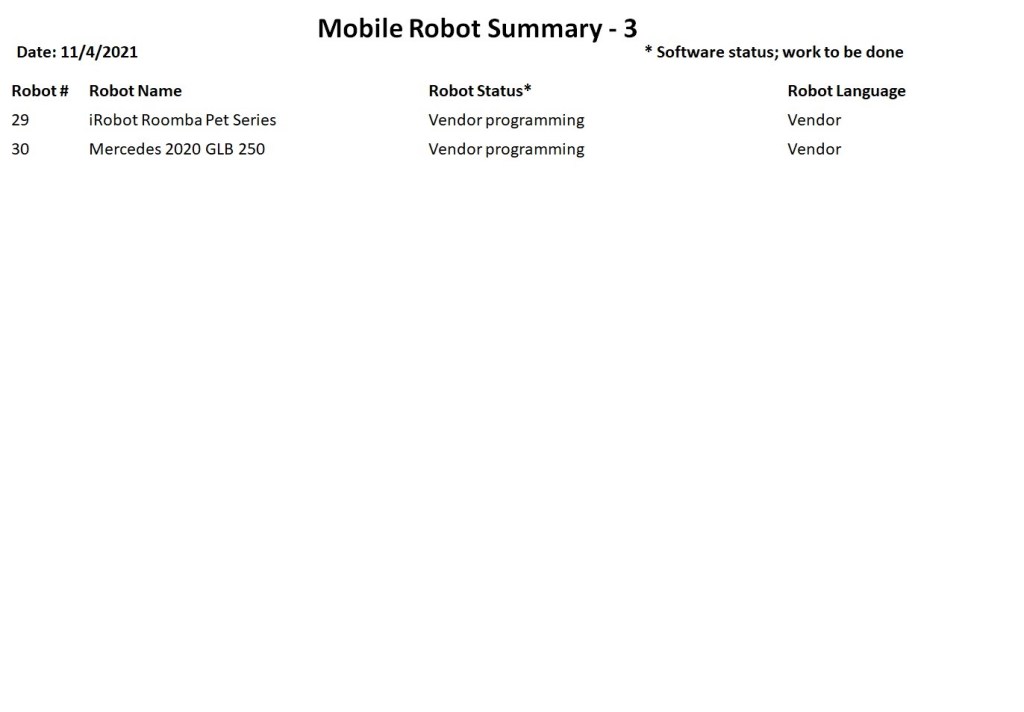
Robot 29 – iRobot Roomba Pet Series: The Roomba series of cleaning autonomous robots as well as similar autonomous products by other vendors and for other functions is a class of consumer robotic products in their implementation provide a range of both cost based simplicity and increasingly complex operation. The objective for the Roomba is to investigate the implementation of drives, sensors and function, particularly the recent SLAM function.

Robot 30 – Mercedes 2020 GLB 250: I have the GLB 250. It is a robot by the previous definition. It is a high instrumented machine that uses machine learning functions to either directly control or at least influence a number of the automobiles operation. This is somewhat of a love/hate relationship. The objective of including the GLB 250 in this robot list is that understanding and evaluating the effectiveness of its robotic functions is certainly of interest for present and future driving.

The following lists the robots I plan to discuss as part of this blog series. As noted previously, there are a lot and there will be new ones so to anticipate being ‘done’ is not realistic.

In addition to the specific robots, there are important topics as part of their implementation. In a future blog I’ll list at least some that will be discussed. I would note again that some of this list represent work that goes back 10+ years. In that time many capabilities have changed although as in the case of the Spygear robot and the Robotis humanoid, some things have not changed all that much.
