This blog continues the summary of the descriptions of mobile robots which have been build or acquired and their general characteristics. Most were built or acquired because of one or more unique functions I wanted to learn about. Note again that the photographs of these robots in some cases are not completely up to date with their current forms.
Robot 11 – VEX Based Battle Bot: This robot started out as a VEX gripper kit machine. For classes on battle bots the arm was modified to be a flipper. It was then used with a duplicate or other small machines for competitions. While basically an RC machine using the VEX Cortex computer and wireless communication, it included an accelerometer to detect when it was no longer upright and LED’s indicating status. An addition function is that two controllers can be connected for two operators. The primary function was/is a middle school student example of a battle bot and two operators.

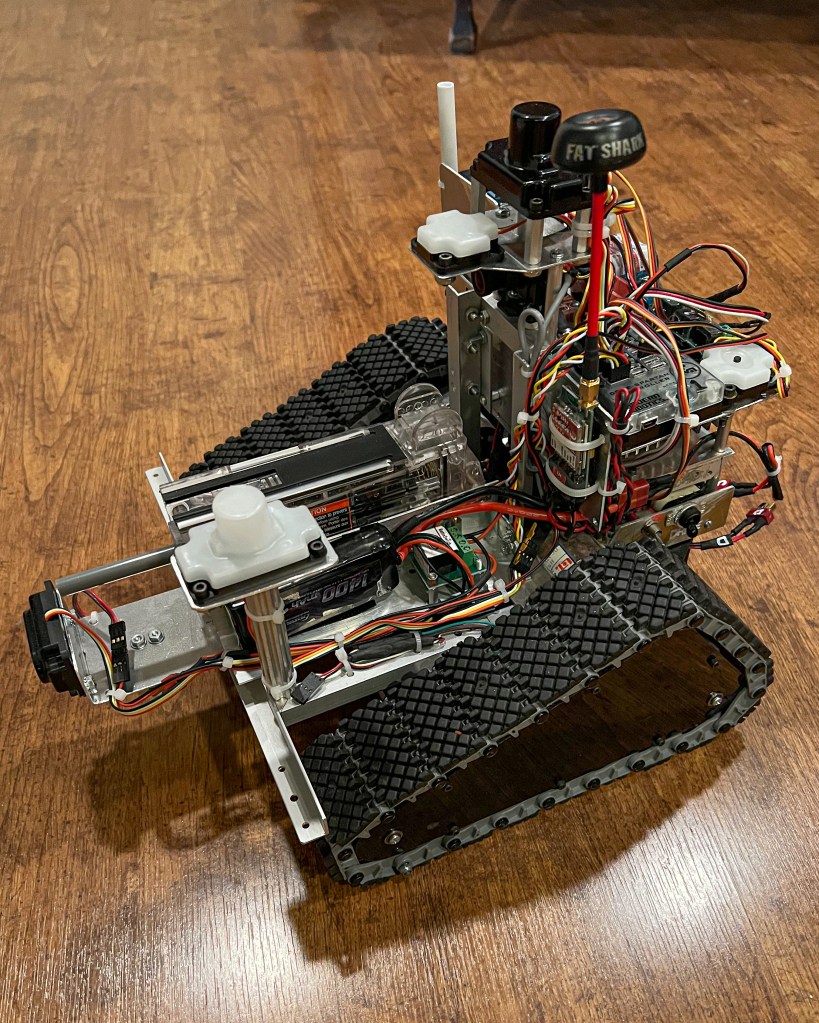
Robot 12 – Tank Track With Airsoft Gun: Like it or not mobile robots are armed. This medium sized tracked robot using a Lynxmotion track kit includes an airsoft gun and laser target pointer. The computer is a Modern Robotics Spartan, essentially a packaged Arduino. An objective of this robot was to have visual feedback through first person viewing and to use an RC controller to get an extended communication range. It is also an exercise in multiple batteries. The primary functions are: airsoft gun, RC communication and visual status feedback.
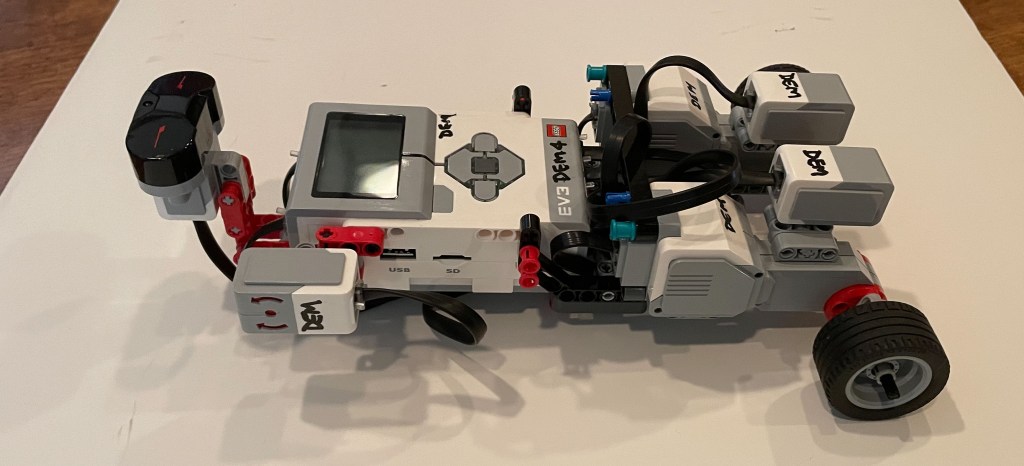
Robot 13 – Two Wheel Balancing: Using a Lego Mindstorms computer and sensors plus Lego structural components and motors a two wheel balancing robot is demonstrated. In addition to ‘simply’ balancing the robot does line following. The primary function is two wheel balance and operation.
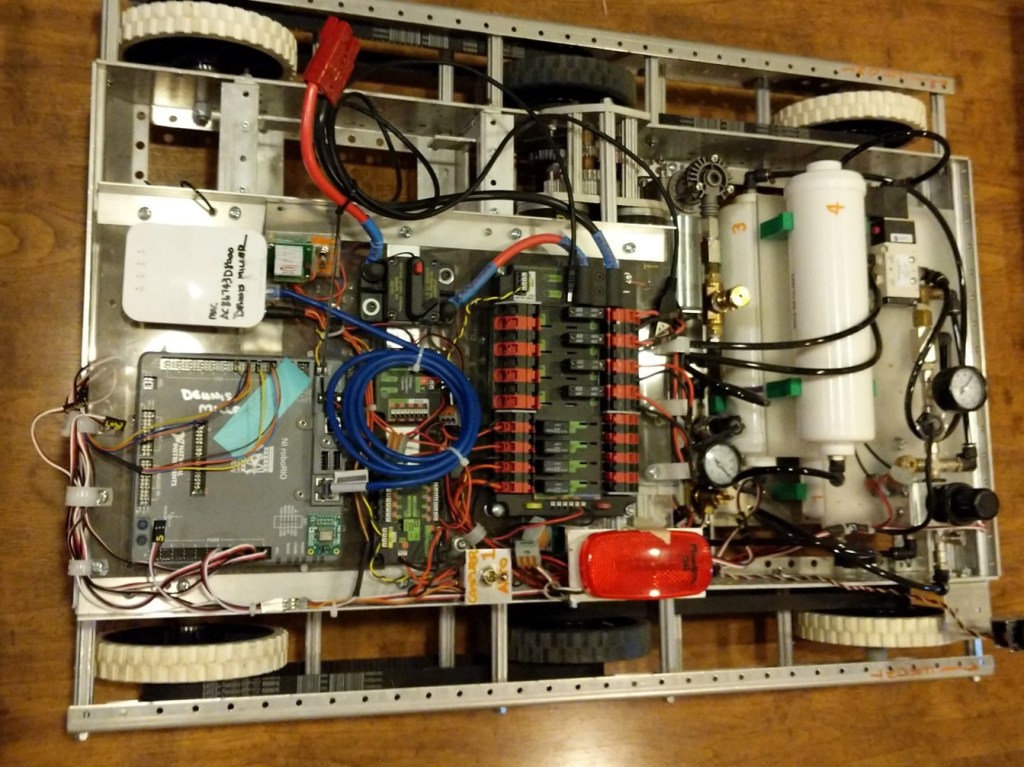
Robot 14 – Large Six Wheel Tank Drive: This robot is a FIRST Robotics competition scale machine. It uses a National Instruments RoboRio computer and a structure from AndyMark. It has a two speed pneumatically switched gearbox. Communication is via Wi-Fi through the National Instruments Windows support software. At this point it is a base structure; plans are for a mechanism to be added. The primary functions are two speed gear box, six wheel tank drive with center wheel offset.
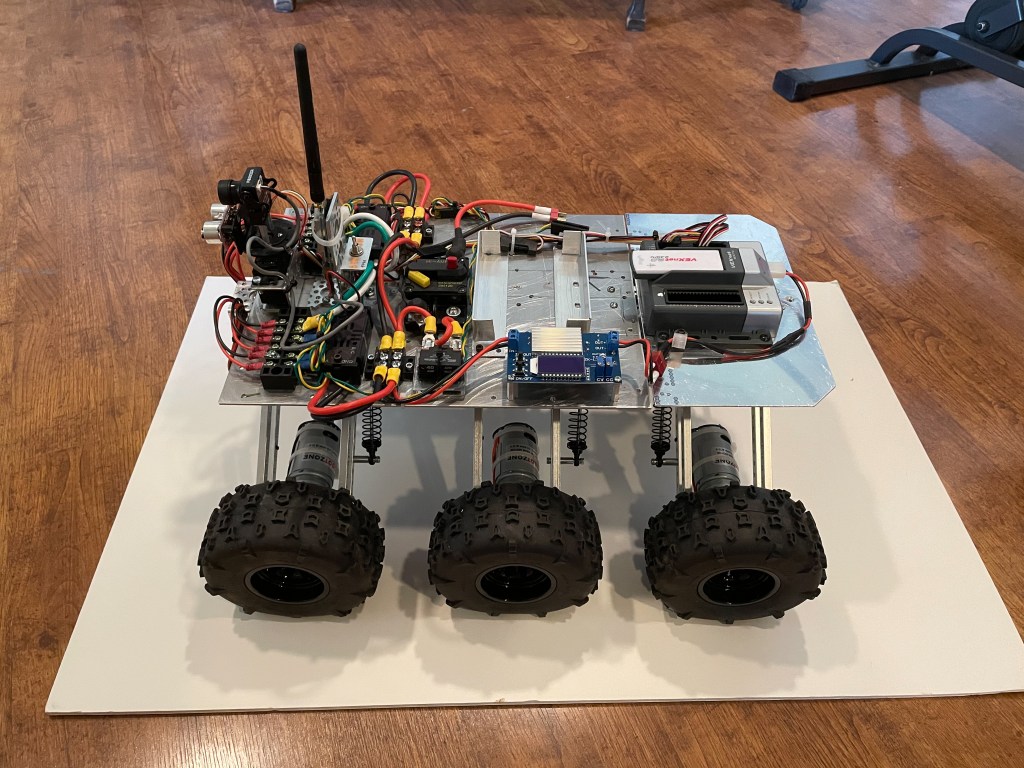
Robot 15 – Six Wheel Tank Drive With Suspension: The structure is a purchased Mantis 6WD Off-Road Rover Kit. The computer is a VEX Cosmos with the associated wireless communication and controller. The sensors include a ultrasonic range sensor and an RC camera. A lithium ion battery is used. The primary objective of this robot is investigate how a wheeled tank drive with all wheel suspension functions.
Robot 16 – Ball With Weighted Drive: This robot is the Sphero Bolt. It is an app-enabled robot ball with programmable sensors + LED matrix, infrared & compass. The ball is 2.9 inches in diameter and is rotated by an internally driven weight. Communication with a smart device is via Bluetooth. The primary interest with this robot is it’s unique approach to motion using a sphere and driven weight.

Robot 17 – Biped Humanoid Robot: Using the Robotis robotics kits humanoid robots were constructed. These robots use Robotis digital servos and have 18 degrees of freedom for arms and legs plus sensors. Communication is using the Robotis wireless RF system. The humanoids run a number of types of provided programs for walking and other actions. These robots are of interest to investigate requirements for biped functions.

Robot 18 – ROS With TurtleBot3: The TurtleBot3 but Robotis is a platform which runs the Robot Operating System (ROS). This is a purchased kit which is based on the Raspberry Pi. It includes a number of sensors one of which is a 360 degree LIDAR. The reason for this robot is to study ROS. This is an ongoing process but after many hours it is still a wall of obscurity.

Robot 19 – DJI FPV: The DJI FPV is a quadrotor design for first person viewing. It is capable of speeds up to 80 miles per hour with a one degree of freedom stabilized camera, obstruction sensors, GPS and status feedback to the head mounted display. This along with two other DJI quadrotors were purchased to use their capabilities in a number of applications. As a robot the objective was to learn about the control and capabilities of drones and the use of FPV for operation.

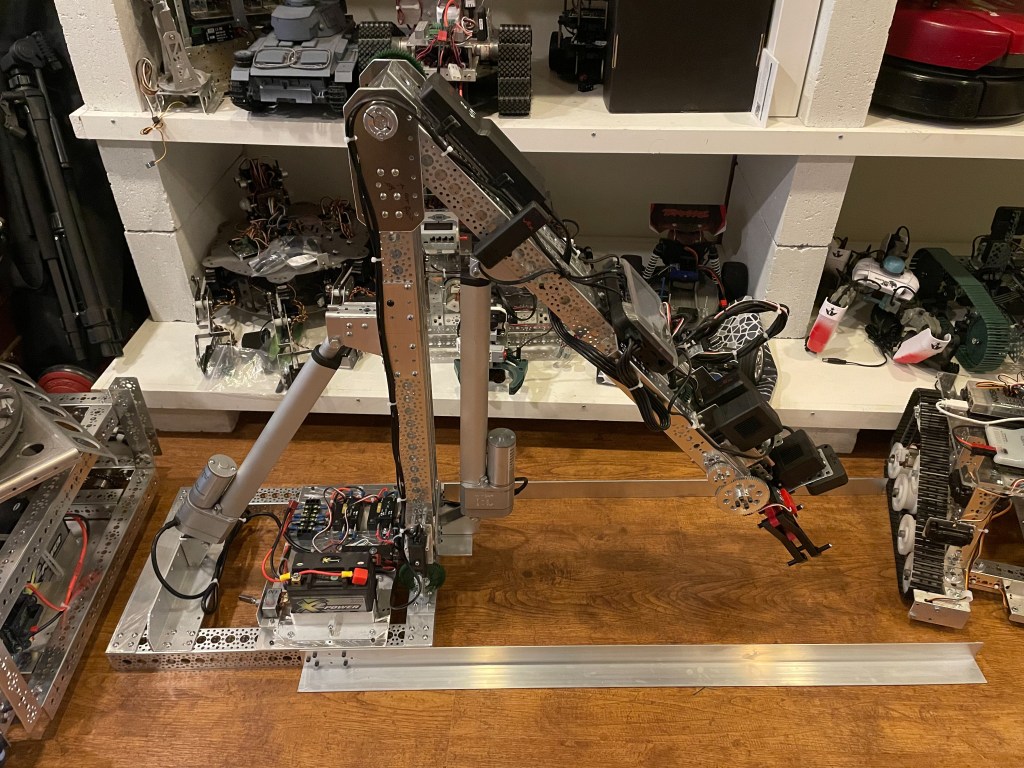
Robot 20 – Five Degree of Freedom Arm and Gripper: A five degree of freedom arm and gripper was built to be mounted on a mobile base. The arms structure uses Actobotics channels, Progressive linear actuators (150 pound and 50 pound), and VEX V5 computer, communication, motors and sensors. The gripper is also VEX. The gripper has 3 degrees of freedom plus a target identification camera. The primary functions of interest were operation of a large arm, the operation of 3 degree of freedom gripper and control of object acquisition and gripping.
This is the next set of ten robots or robot components. The next blog will finish these description summaries. I’ll then start descriptions of individual robots mixed with some specifics on other aspects of the robot such as computers used, batteries used and issues and others.
