As a start to the Build Mobile Robots blog I will summarize the ‘menagerie’ of robots I have. There are numbers of words used for groups of robots … swarm, fleet … ; menagerie works for mine as they fit into the definition ‘a strange or diverse collection of things’. As they have been built or acquired to explore many aspects of mobile robots there is no common structural or functional theme. My ‘menagerie’ includes 25 to 30 robots. These are at various stages of construction, programming or use. For example the ‘tracked airsoft gun’ robot is complete and is programmed to carry out three demonstration functions. The DJI FPV drone robot is in use with flights every couple of weeks. The ‘large mecanum drive robot’ is constructed but has not been programmed. With a few exceptions, most of the robots were constructed to learn about one or more specific aspects of mobile robot implementation and/or use. This includes different drive systems, computers, sensors, software, construction materials, use/mission … and others. The robots also represent many years of acquisition by construction or purchase.
In this blog and one or two more the mobile robot menagerie will be described through a picture or two and a brief description. The latter will include what about the robot specifically makes it of interest. Note that the robot pictures may not be up to date with respect to all components mentioned. A summary table will be provided when all current robots have been described. As the blog progresses specific aspects of these robots will be looked at in some detail.
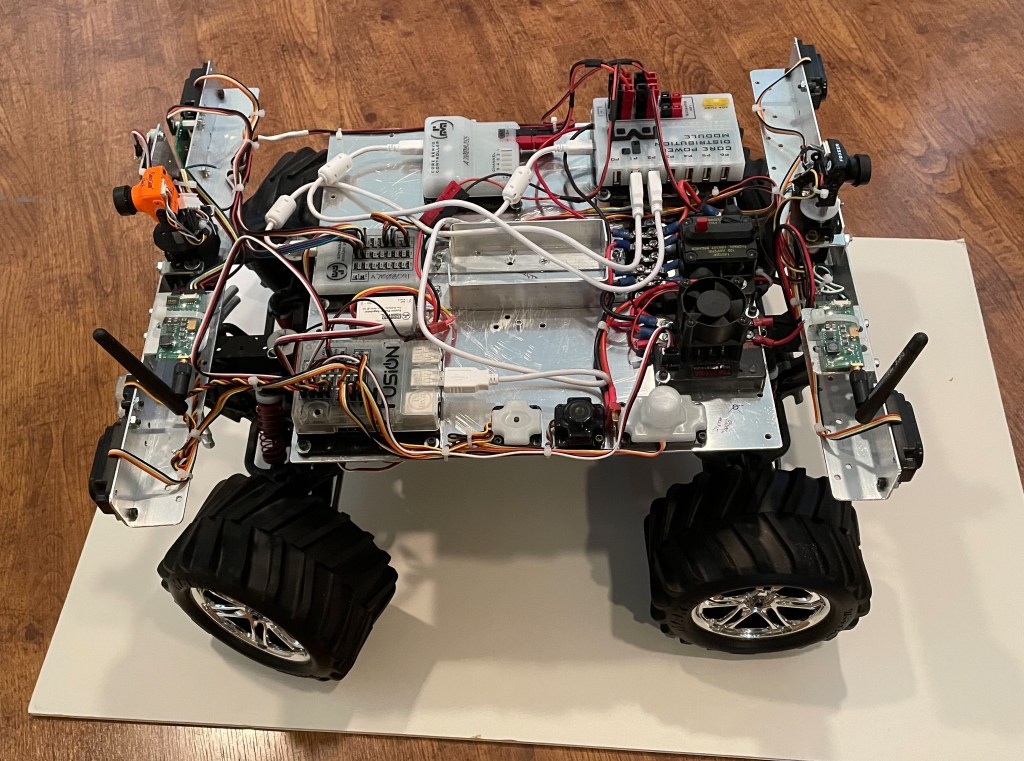
Robot 1 – Ackerman Steering and Suspension: This is a Traxxas 1/10 scale truck chassis with a Modern Robotics Fusion computer and sensors added. Teleoperation is with a Bluetooth connection to a Logitech controller. Of primary interest for this robot is the Ackerman steering and four wheel drive with suspension. It has front and rear first person viewing cameras (FPV) and uses a Lithium-Ion battery. It has no interaction mechanism.
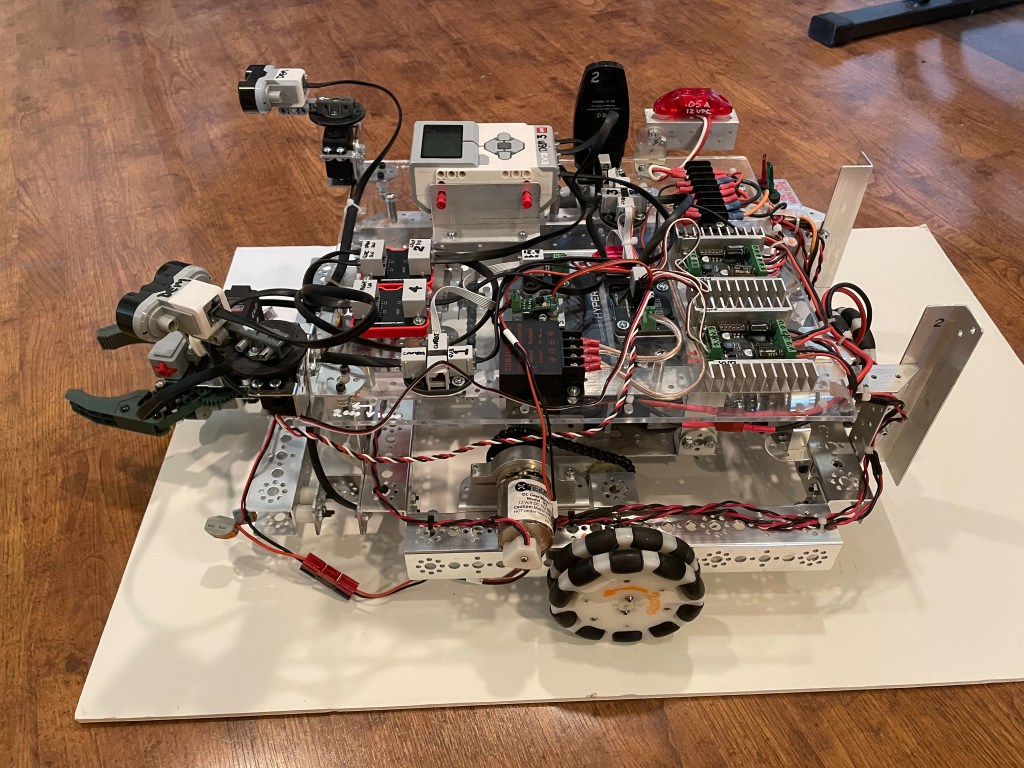
Robot 2 – Omni Drive: This robot was constructed with Tetrix beam components. It uses a Lego Mindstorms computer and sensors. Teleoperation is with a Mindsensors transmitter/receiver and Logitech controller. Of primary interest is the control of the omni drive. Tetrix motors with Sabertooth controllers are used. It has a nickel metal hydride battery. A VEX gripper is used for grasping and moving objects.
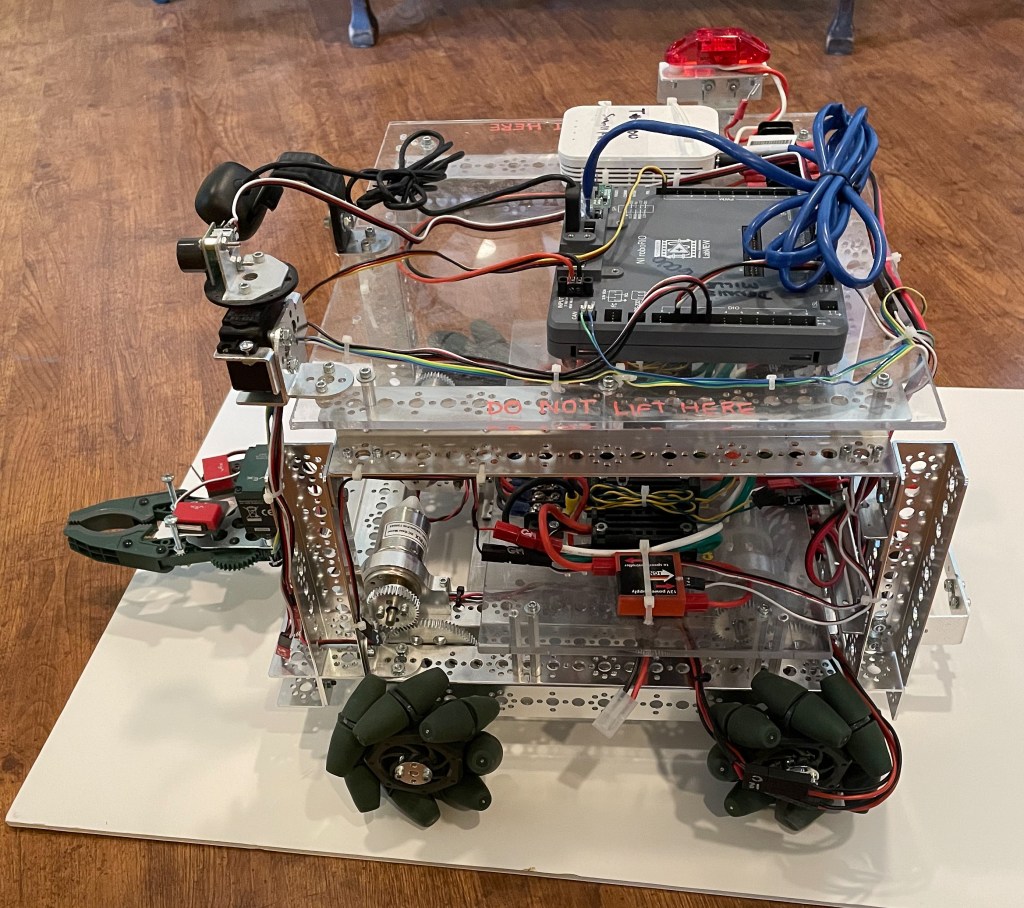
Robot 3 – Medium Mecanum Drive: A Tetrix beam frame and motors are used for a medium sized Mecanum drive robot. The computer is a National Instruments RoboRio. Teleoperation and camera communication is via a Wi-Fi module. A CAN network is used with Talon motor controllers. It uses a nickel metal hydride battery. A VEX gripper is used for grasping and moving objects. The primary characteristics of interest for this robot are the Mecanum drive and CAN network.
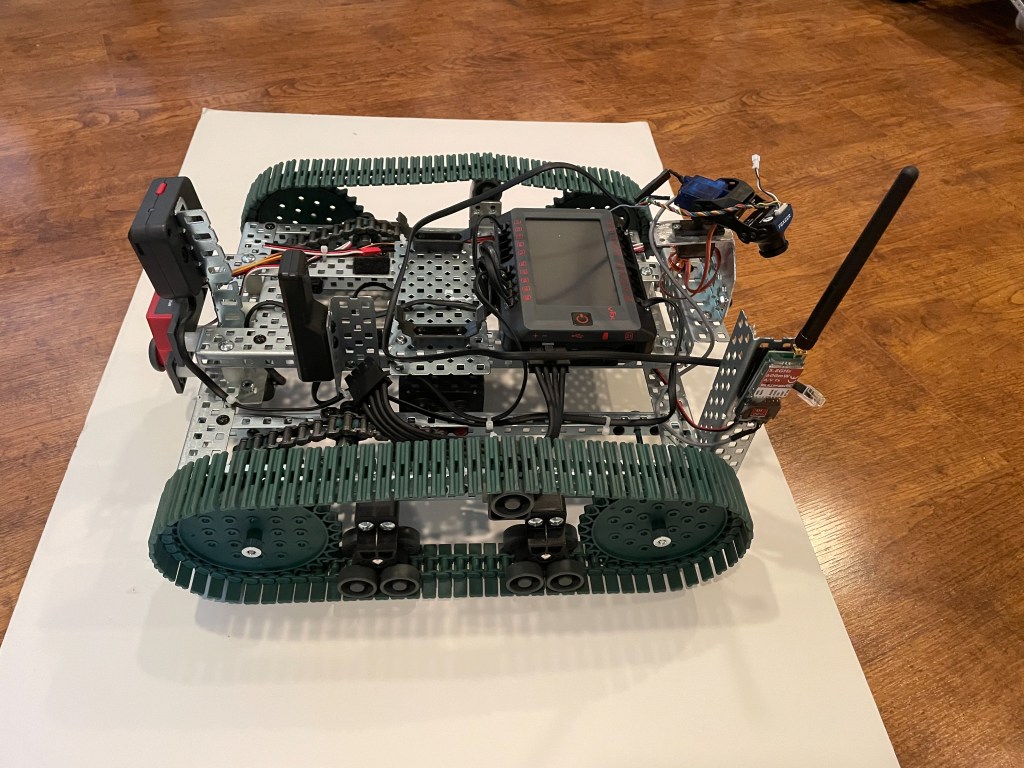
Robot 4 – VEX Track Drive: VEX structure materials are used for a basic tank drive robot. The robot system uses the VEX V5 computer, motors, communication and battery. A V5 camera is used in one direction for object detection and tracking. An RC camera is used in the other direction for first person view control. The object detection camera and FPV camera with a Fatshark headset are the primary interest aspects of this robot.
Robot 5 – Tetrix Tank Track Drive: This is a tracked robot using tank drive built on a Tetrix frame structure. It uses a Modern Robotics Fusion controller and Modern Robotics sensors, core modules and motors with rotation sensing. Teleoperation is through a Logitech controller and Bluetooth. Ground sensors are used for step detection. An infrared sensor is used for navigation. Power is via a lithium ion battery.

Robot 6 – Tetrix Swerve Drive: The swerve drive robot is constructed using a: 1) Tetrix channel frame, 2) Tetrix motors, 3) 3D printed wheel mounting supports, 4) Sabertooth motor controllers and Hitec servos. The computer, communication and sensors are of the VEX V5 system. A Lithium ion battery is used with the V5 and nickel metal hydride for motor power. The swerve drive capability is the primary feature of interest.
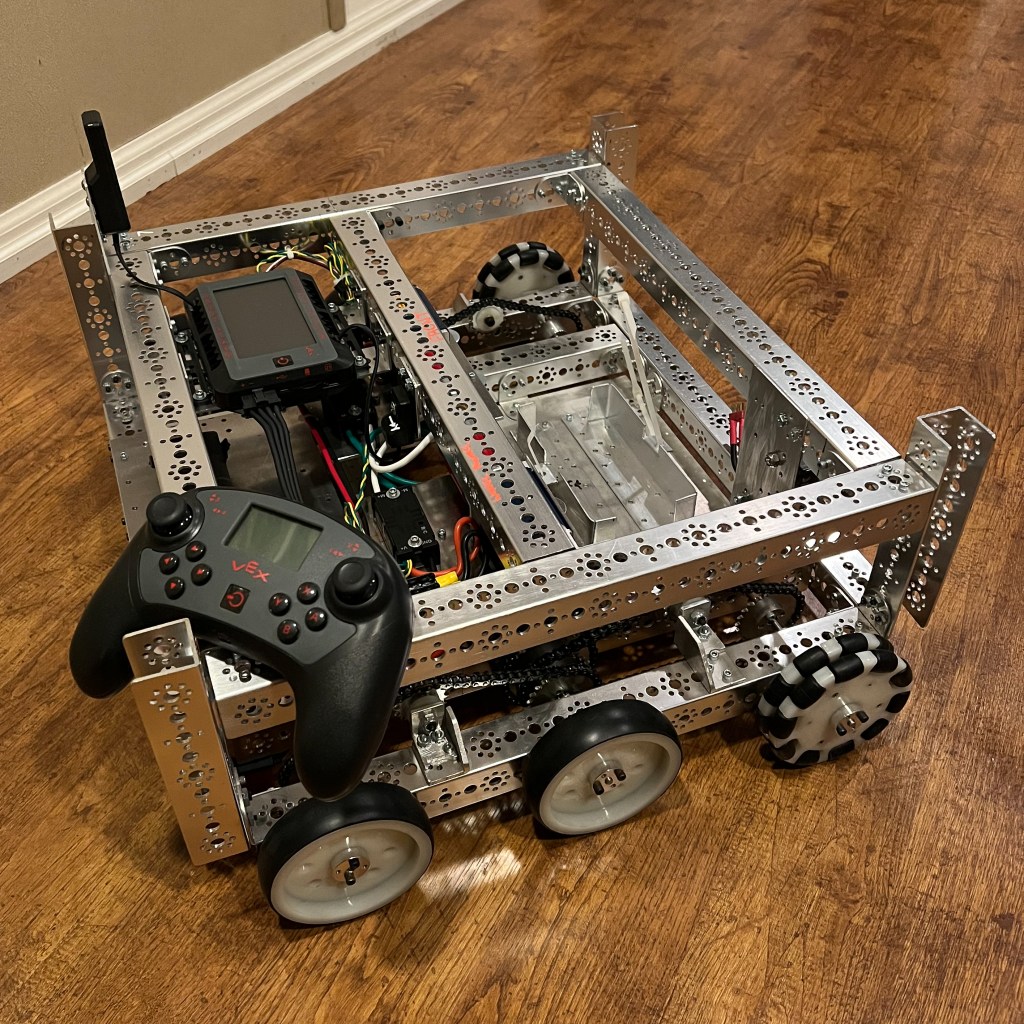
Robot 7 – Six Wheel Medium Tank Drive: This robot uses a Tetrix channel frame, 4 standard wheels and two omni wheels. A motor and gear box on each side use sprockets and chains to drive the wheels. The VEX V5 computer, communication, controller and sensor system are used. A 14 amp hour 12 volt battery is used with Talon motor controllers. The plan is to add a mechanism to the base. This mechanism as well as the wheels plus omni tank drive are the features of interest.
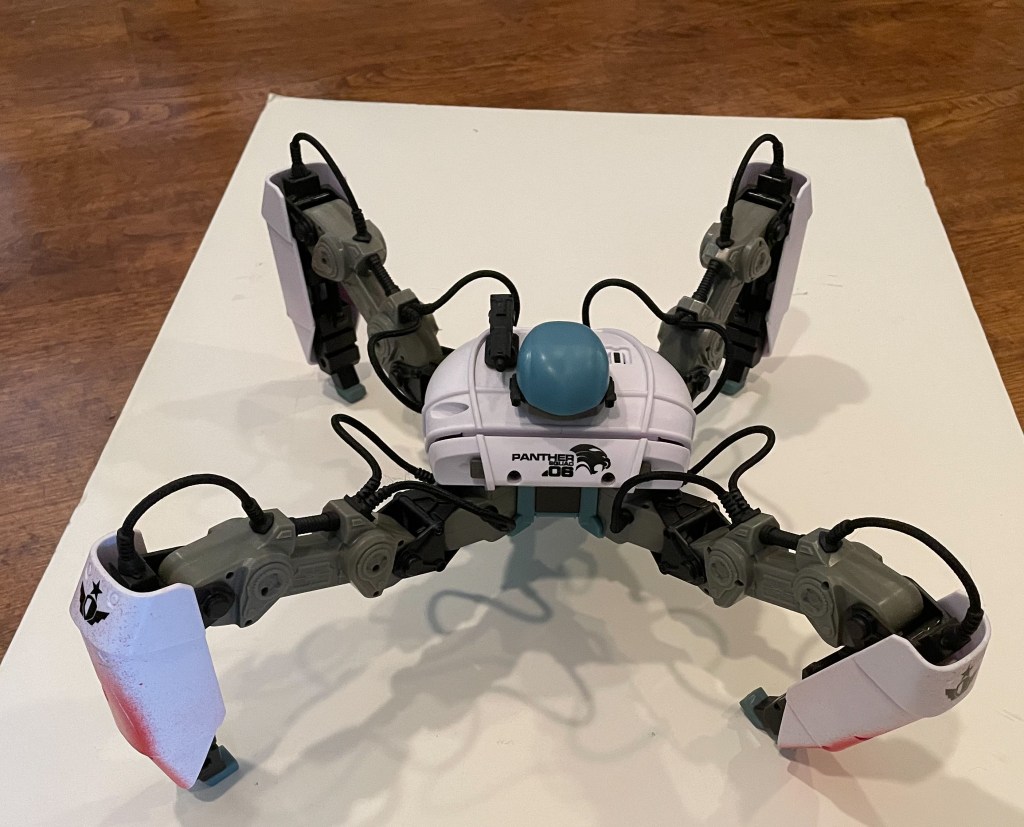
Robot 8 – Mekamon Quadped – The Mekamon quadped is a purchased robot. It was developed in 2016-18 as a part of a augmented reality game system. The product was discontinued in 2019. The robot itself is a very good example of a quadped walking system. The computer, servos and sensors of the Mekamon are internal. Control is via Bluetooth to a smart phone or tablet run app. The capability of interest is the operational characteristics of an effectively programmed quadped.
Robot 9 – Kobra Arm and Gripper With Dual Tracks – This is a purchased ‘qualified’ robots. It’s essentially all RC but does provide a camera for remote sensing. It has a number of features of interest: 1) a six degree of freedom arm and gripper system, 2) dual tracks allowing some degree of climbing, 3) and Wi-Fi camera working with the gripper. In addition, with two of these machines the complexity of arm coordination can be tested.

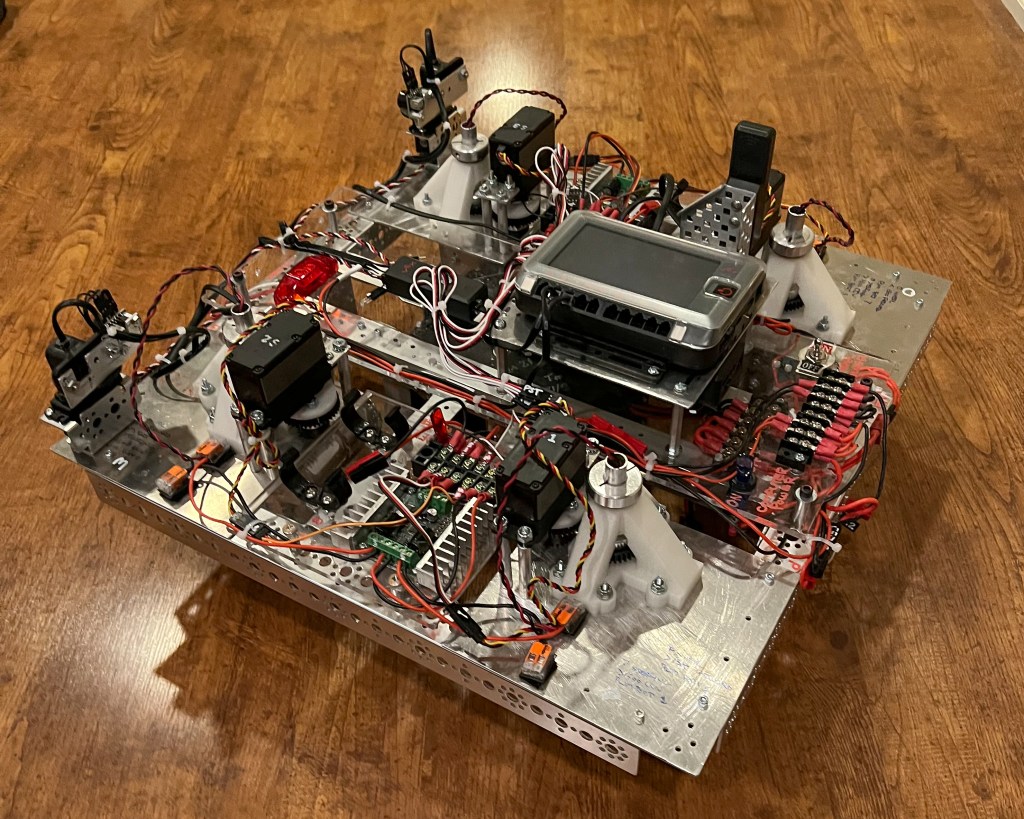
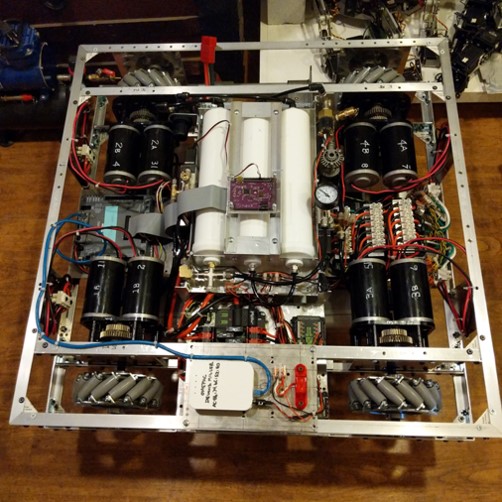
Robot 10 – Large Mecanum Drive: This robot is constructed with aluminum angle and plate and is 32″ x 32″ x 10″. Each wheel is driven by dual CIM motors through a two speed pneumatic switched gearbox. Each motor is controlled with a Talon motor controller. The computer is a National Instruments RoboRio. Communication is Wi-Fi through a computer connected via USB to the controller. The battery is a 7 amp hour lead acid. The features of interest are: 1) controlling a robot of this size, 2) use of 2 speed transmission 3) Wi-Fi communication and 4) using pneumatic control.
This is the first set of robots. The next blog will include another set.
